Grasping Force Estimation by sEMG Signals and Arm Posture- Tensor Decomposition Approach
This article has been accepted in Journal of Bionic Engineering.
Tags: publications Robot_Hand, EMG
This article has been accepted in Journal of Bionic Engineering.
Tags: publications Robot_Hand, EMG
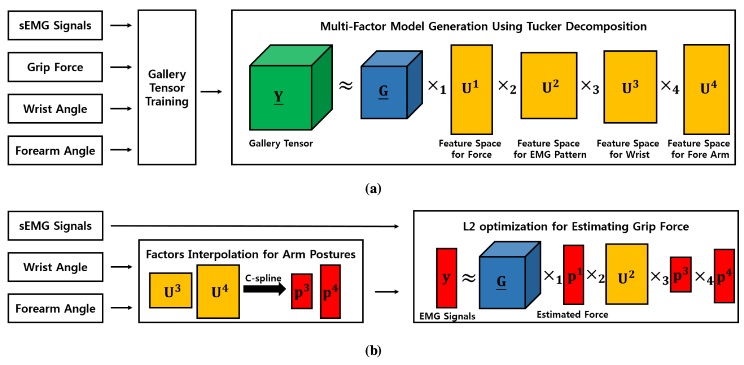
Grasping force estimation using surface Electromyography (sEMG) has been actively investigated as it can increase the manipulability and dexterity of prosthetic hands and robotic hands. Most of the current studies in this area only focus on finding the relationship between sEMG signals and the grasping force without considering the arm posture. Therefore, regression models are not suitable to predict grip forces in various arm postures. In this paper, a method to predict the grasping force from sEMG signals and various grasping postures is developed. The proposed algorithm uses a tensor algebra to train a multi-factor model relevant to sEMG signals corresponding to various grasping forces and postures of the wrist and forearm in multiple dimensions. The multi-factor model is then decomposed into the four independent fac-tor spaces of the grasping force, sEMG signals, wrist posture, and forearm posture. Moreover, when a participant exe-cutes a new posture, new factors for the wrist and forearm are interpolated in the factor spaces. Thus, the grasping force with various postures can be predicted by combining these factors. The effectiveness of the proposed method is verified through experiments with ten healthy subjects demonstrating higher performance of the grasping force prediction than the previous algorithm.
You can see the source codes in my git repository. The source codes will be operated in Matlab
Please visit Robot Hand project.