Mobile Manipulation using HQP
We are developing the controller of the dual-arm mobile manipulator by using HQP. In this study, we suggests the task transition algorithm to handle the discontinuity of the control input.
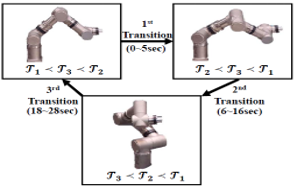
Task Transition Algorithms
In this study, we suggests the task transition algorithm to handle the discontinuity of the control input.
Robot Hand Control
In this project, I want to figure out how to imitate human hand motion and force for the robot hand.
DRC Finals 2015
We particaped in DRC Finals 2015, as Team SNU. I am student leader of our team.
CPR Robot
We developed CPR robot. We tested our robot in various experiments with pig.
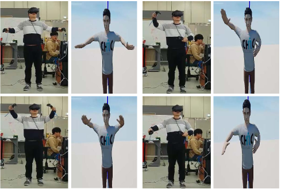
Human Imitation
We implemented various algorithms to transfer from human motion to robot.