Overview
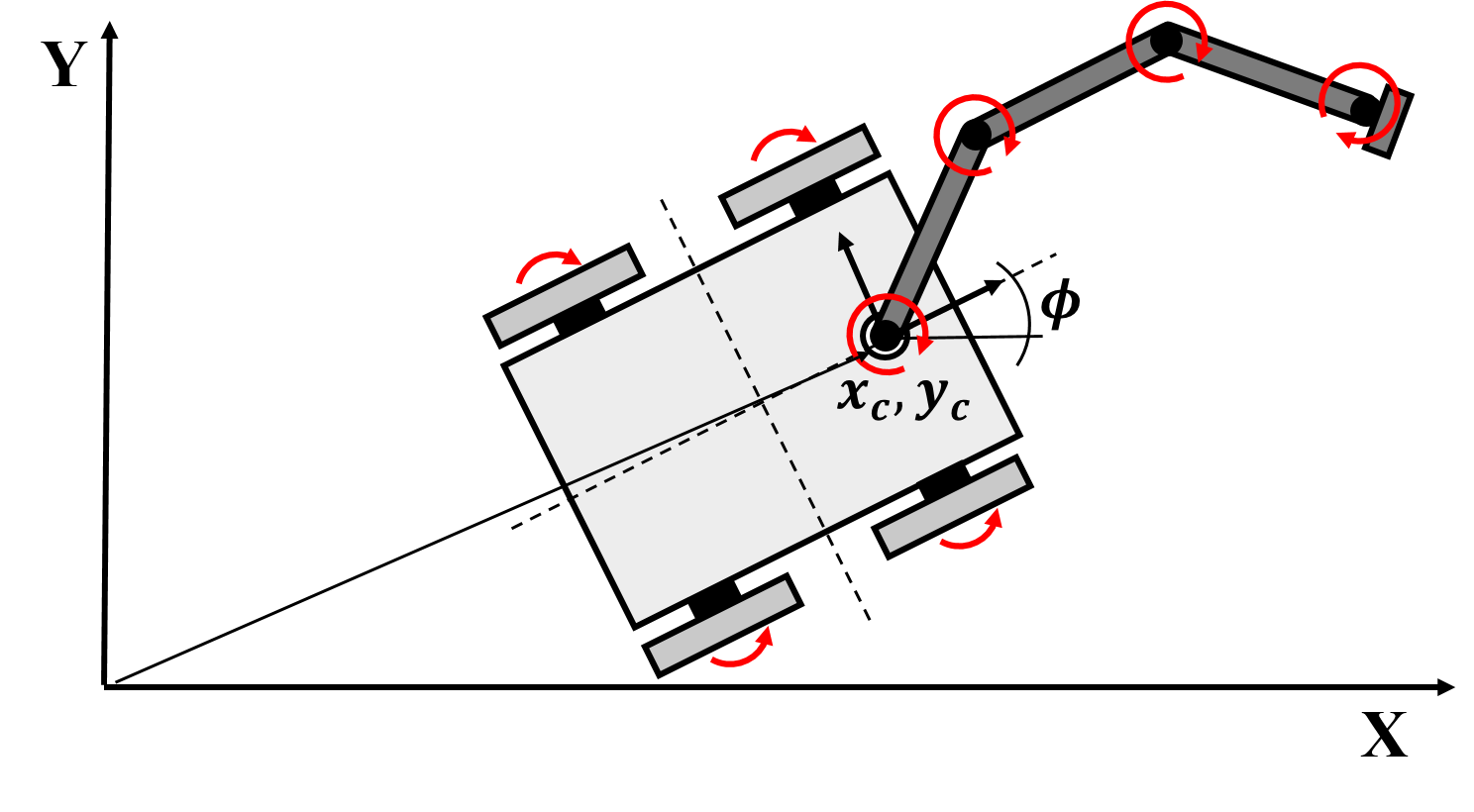
Mobile robot and manipulator have a long history on their development. Combining these two robots, mobile manipulator has the potential of versatile skills. It has a high dimensional state space. However, combining these two robots causes many problems. First of all, the control system becomes complicated. Most manipulators actuate with the assumption that their basement is fixed. On the other hand, the mobile base and the manipulator give dynamic effects to each other. Therefore, we should consider the effects when we control the robot. Secondly, the target control accuracy would be lower than a fixed manipulator. As containing high dimensional state space, it inevitably leads to uncertainty (especially in mobile part).
To handle these problems, we are focusing on controlling and planning this mobile manipulator.
Experimental Equipments
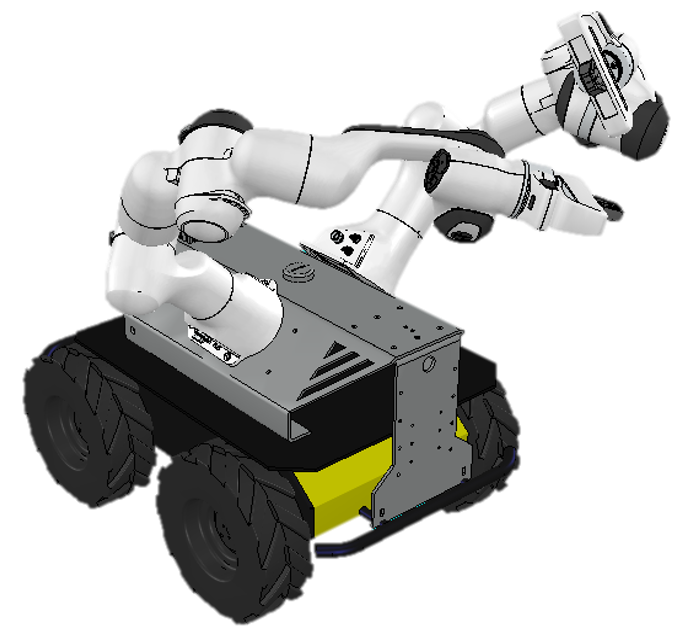
The system consists of two robots. The mobile base is Clearpath Husky and the manipulator is Franka Emika Panda.
It has a powerful computation unit to solve complicated whole-body dynamics and plan motions in high dimensional state space. The specification is described below.
- CPU: Intel i7-7700K
- RAM: 16 GB
- Storage (SSD): 500 GB
- OS: Ubuntu 16.04 (with preempt_rt kernel)
Algorithms
- Controller
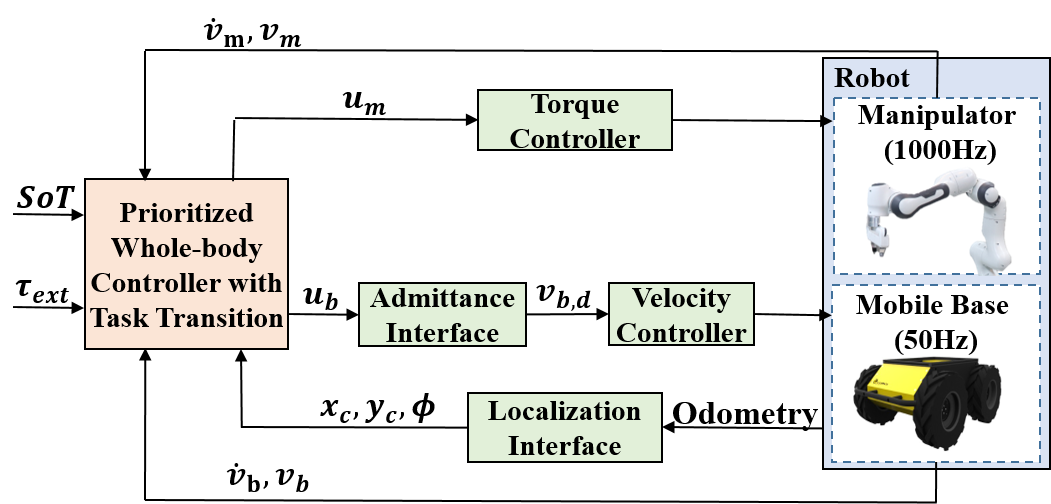
- Wholebody controller based on the HQP controller.
- Task transition algorithm for the HQP frameworks (with Joint limit, singularity, and obstacle avoidance algorithm)
- Momentum based observer
- Planner
- Basic BiRRT(-connect) algorithm
- VKC based dual-arm manipulation algorithm
Experimental Results
Coffee Delivery Demo #1
Making trajectory by using BiRRT
Controlling by Whole-body HQP controller
Task Transition by considering multiple tasks
Coffee Delivery Demo #2
Making trajectory by using BiRRT
Controlling by Whole-body HQP controller
Task Transition by considering multiple tasks
Momentum Observer Demo
Detecting disturbances using momentum based observer
Compliance Control
TODO
- Dual Arm Manipulation
- Although it is already done in simulation, we cannot experiments with the real robot. We want to buy one more manipulator! (Give me the money.)
- More powerful planner
- Door openning algorithm