Self-collision Avoidance Algorithm for Robot Manipulator Using Continuous Task Transition Algorithm
This article has been accepted on KROC 2019
Tags: publications CLIK
This article has been accepted on KROC 2019
Tags: publications CLIK
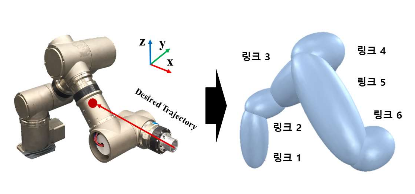
본 논문에서는 매니퓰레이터의 내부 링크 간 자가 충돌을 방지하는 알고리즘을 제안한다 . 알고리즘은 해의 불연속성 없 이 작업의 삽입이나 삭제가 가능한 작업 전이 알고리즘을 기반으로 한다 . 또한 , 알고리즘은 매니퓰레이터의 내부 링크 간 거리 값에 따라 일정 거리 이하부터 서로 멀어지는 방향의 작업을 삽입하여 충돌을 회피한다 . 알고리즘의 검증은 7 자 유도 매니퓰레이터를 통해 이루어졌다 . 또한 , 실험 영상은 https://youtu.be/FH2wKkQfCIc 을 통해 확인할 수 있다 .