Inverse Kinematics Minimizing JointsTorque with Given Target Wrench
This article has been accepted on KROC 2020
Tags: publications CLIK
This article has been accepted on KROC 2020
Tags: publications CLIK
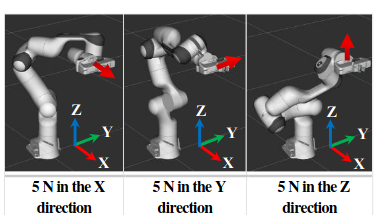
When handling an object, people usually optimize their pose to ease work load. It is possible because the required joint torque to realize target wrench can be changed bydifferent joint configurations. Using this property, we propose an inverse kinematics method to lessen the joint torque while the robot handles an object. The proposed method minimizes the norm of joint torque ensuring position and orientation constraintsby using non-linear optimization method. As a result, we could obtain a joint configuration which doesnotviolatethe constraints and achievesthe smaller norm of joint torquethan thatfrom conventional inverse kinematics algorithm.