Reactive Self-Collision Avoidance for a Differentially Driven Mobile Manipulator
This article has been accepted on Sensors
Tags: publications HQP
This article has been accepted on Sensors
Tags: publications HQP
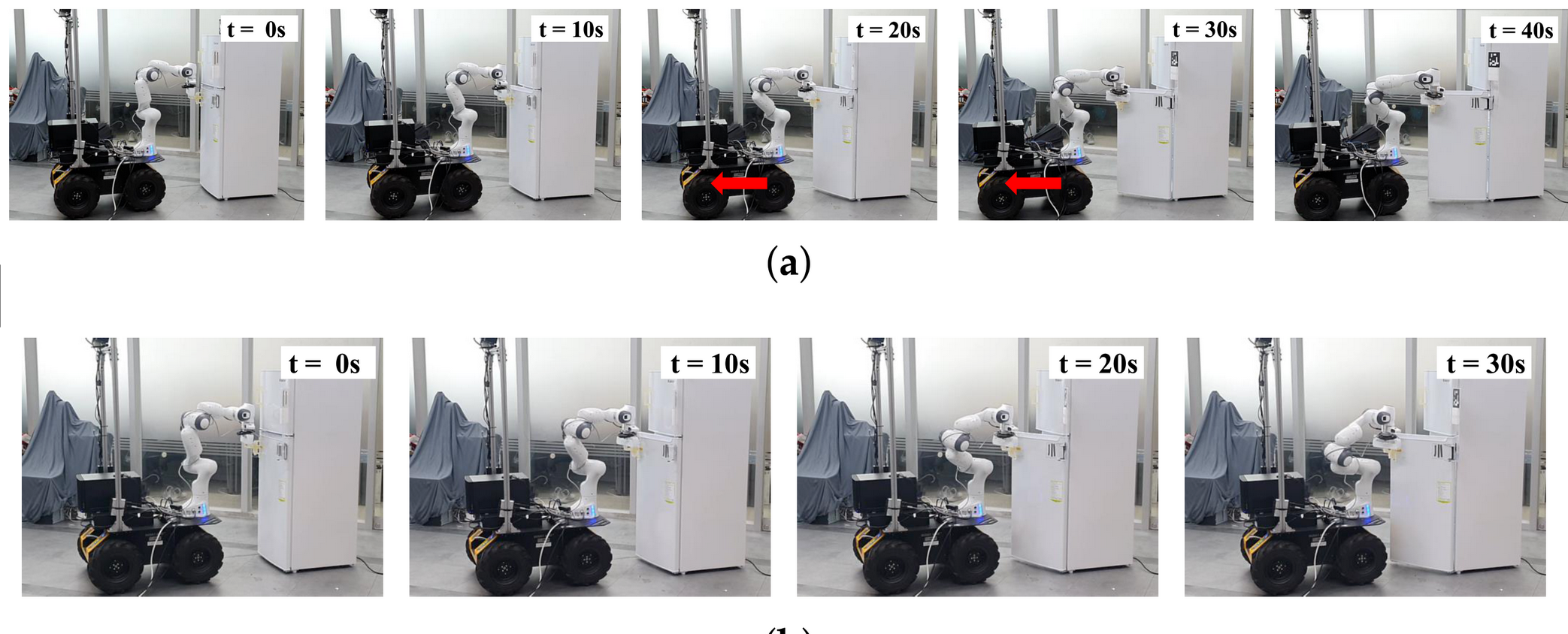
This paper introduces a reactive self-collision avoidance algorithm for differentially driven mobile manipulators. The proposed method mainly focuses on self-collision between a manipulator and the mobile robot. We introduce the concept of a distance buffer border (DBB), which is a 3D curved surface enclosing a buffer region of the mobile robot. The region has the thickness equal to buffer distance. When the distance between the manipulator and mobile robot is less than the buffer distance, which means the manipulator lies inside the buffer region of the mobile robot, the proposed strategy is to move the mobile robot away from the manipulator in order for the manipulator to be placed outside the border of the region, the DBB. The strategy is achieved by exerting force on the mobile robot. Therefore, the manipulator can avoid self-collision with the mobile robot without modifying the predefined motion of the manipulator in a world Cartesian coordinate frame. In particular, the direction of the force is determined by considering the non-holonomic constraint of the differentially driven mobile robot. Additionally, the reachability of the manipulator is considered to arrive at a configuration in which the manipulator can be more maneuverable. In this respect, the proposed algorithm has a distinct advantage over existing avoidance methods that do not consider the non-holonomic constraint of the mobile robot and push links away from each other without considering the workspace. To realize the desired force and resulting torque, an avoidance task is constructed by converting them into the accelerations of the mobile robot. The avoidance task is smoothly inserted with a top priority into the controller based on hierarchical quadratic programming. The proposed algorithm was implemented on a differentially driven mobile robot with a 7-DOFs robotic arm and its performance was demonstrated in various experimental scenarios.