A Unified Framework for Overcoming Motion Constraints of Robots Using Task Transition Algorithm
This article is accepted in Journal of Korea Robotics Society.
Tags: publications Task_Transition
This article is accepted in Journal of Korea Robotics Society.
Tags: publications Task_Transition
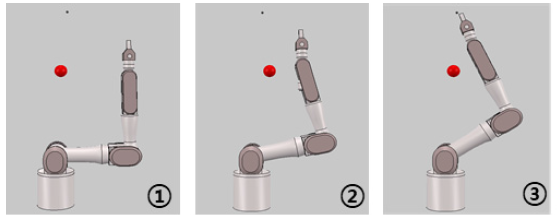
This paper proposes a unified framework that overcomes four motion constraints including joint limit, kinematic singularity, algorithmic singularity and obstacles. The proposed framework is based on our previous works which can insert or remove tasks continuously using activation parameters and be applied to avoid joint limit and singularity. Additionally, we develop a method for avoiding obstacles and combine it into the framework to consider four motion constraints simultaneously. The performance of the proposed framework was demonstrated by simulation tests with considering four motion constraints. Results of the simulations verified the framework’s effectiveness near joint limit, kinematic singularity, algorithmic singularity and obstacles. We also analyzed sensitivity of our algorithm near singularity when using closed loop inverse kinematics depending on magnitude of gain matrix.
Please visit Task Transition project.