Human Imitation
We implemented various algorithms to transfer from human motion to robot.
Tags: projects HQP
We implemented various algorithms to transfer from human motion to robot.
Tags: projects HQP
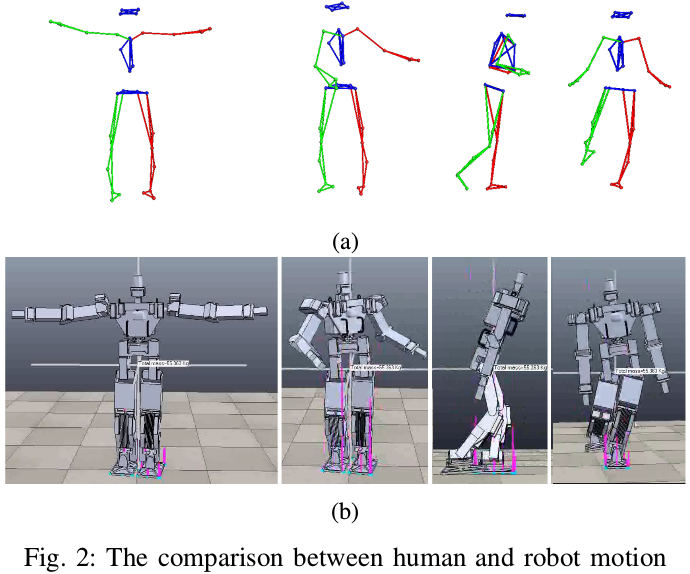
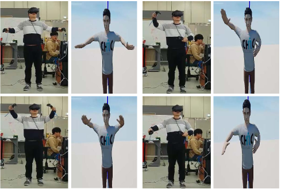
This is my personal project in order to perform my motions in the humanoid robot. I implemented a few of algorithms using FABRIK, tensor algebra, and deep learning.