Real-time Inverse Kinematics Technique for Controlling Redundant Avatar Arm
This article is accepted in UR 2018.
Tags: publications Imitation
This article is accepted in UR 2018.
Tags: publications Imitation
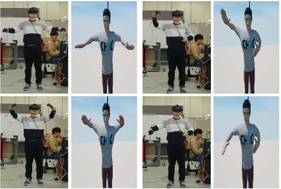
In this paper, a preliminary study of a real-time Inverse Kinematics (IK) technique is presented to transfer human arm postures to a humanoid avatar with 7 or more DoF arm. The proposed framework is based on Forward And Backward Reaching Inverse Kinematics (FABRIK) solver which is one of heuristic iterative methods, in order to calculate joint positions. In addition, the proposed method can calculate feasible arm postures of the avatar for treating kinematic redundancy by minimizing kinetic and potential energy. Thus, the proposed method can generate human-like motions. The proposed algorithm was implemented on avatar simulator with Virtual Reality (VR) devices and its performance was demonstrated by imitating human arm motions in real-time.
Please visit Imitation project.